RAI 랩 인턴을 시작하면서 가장 먼저 한 작업은
N 자유도 매니퓰레이터의 URDF를 파싱하고 Kinematics를 푸는 라이브러리를 만드는 것이었습니다.
2달 동안 정말 힘들었지만 새로운 걸 알아가는 재미가 있어 버틸 수 있었습니다.
코딩실력이 부족해 많이 어설프지만 누군가 도움이 되었으면 하는 바램으로 구현하였습니다.
pykin
![]()
![]()
Python Interface for the Robot Kinematics Library pykin
This library has been created simply by referring to ikpy
Features
- Pure python library
- Support only URDF file
- Compute Forward, Inverse Kinematics and Jacobian
- There are two ways to find the IK solution, referring to the Introduction to Humanoid Robotics book.
- Compute Collision checkinkg
- Plot Robot Kinematic Chain and Robot Mesh (STL file)
Installation
Requirements
You need a python-fcl package to do object collision checking.
-
For Ubuntu, using
aptsudo apt install liboctomap-devsudo apt install libfcl-dev -
For Mac, First, Download the source and build it.
-
octomap
git clone https://github.com/OctoMap/octomap.git$ cd octomap $ mkdir build $ cd build $ cmake .. $ make $ make install -
fcl
git clone https://github.com/flexible-collision-library/fcl.gitSince python-fcl uses version 0.5.0 of fcl, checkout with tag 0.5.0
$ cd fcl $ git checkout 0.5.0 $ mkdir build $ cd build $ cmake .. $ make $ make install
-
If the above installation is complete
pip install python-fcl
Install Pykin
pip install pykin
When git clone, use the –recurse-submodules option.
The download may take a long time due to the large urdf file size.
git clone --recurse-submodules https://github.com/jdj2261/pykin.git
Quick Start
-
Robot Info
You can see 4 example robot information.
baxter, iiwa14, panda, and sawyer - Forward Kinematics
- Jacobian
- Inverse Kinematics
- Self-Collision Check
Visualization
-
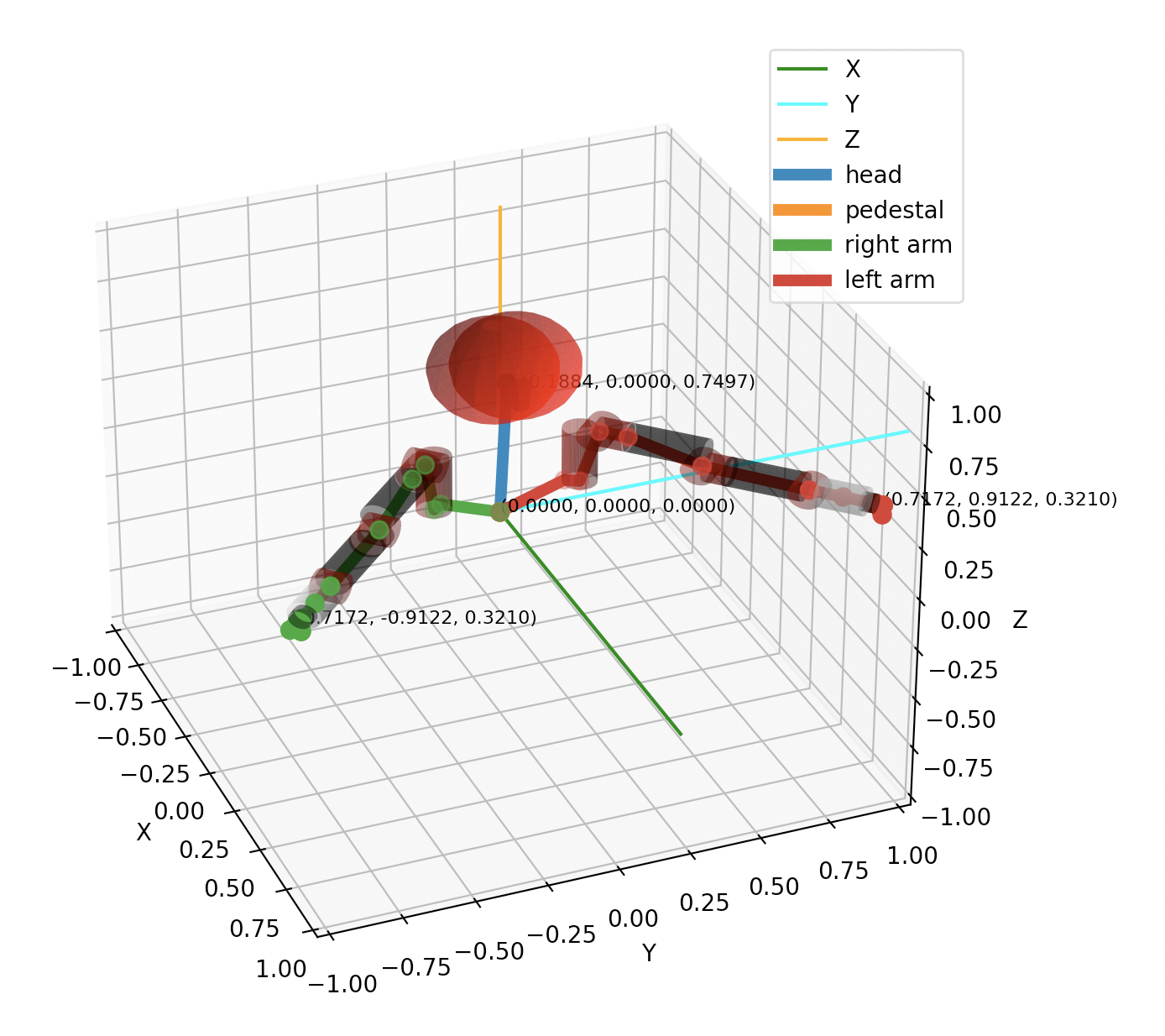
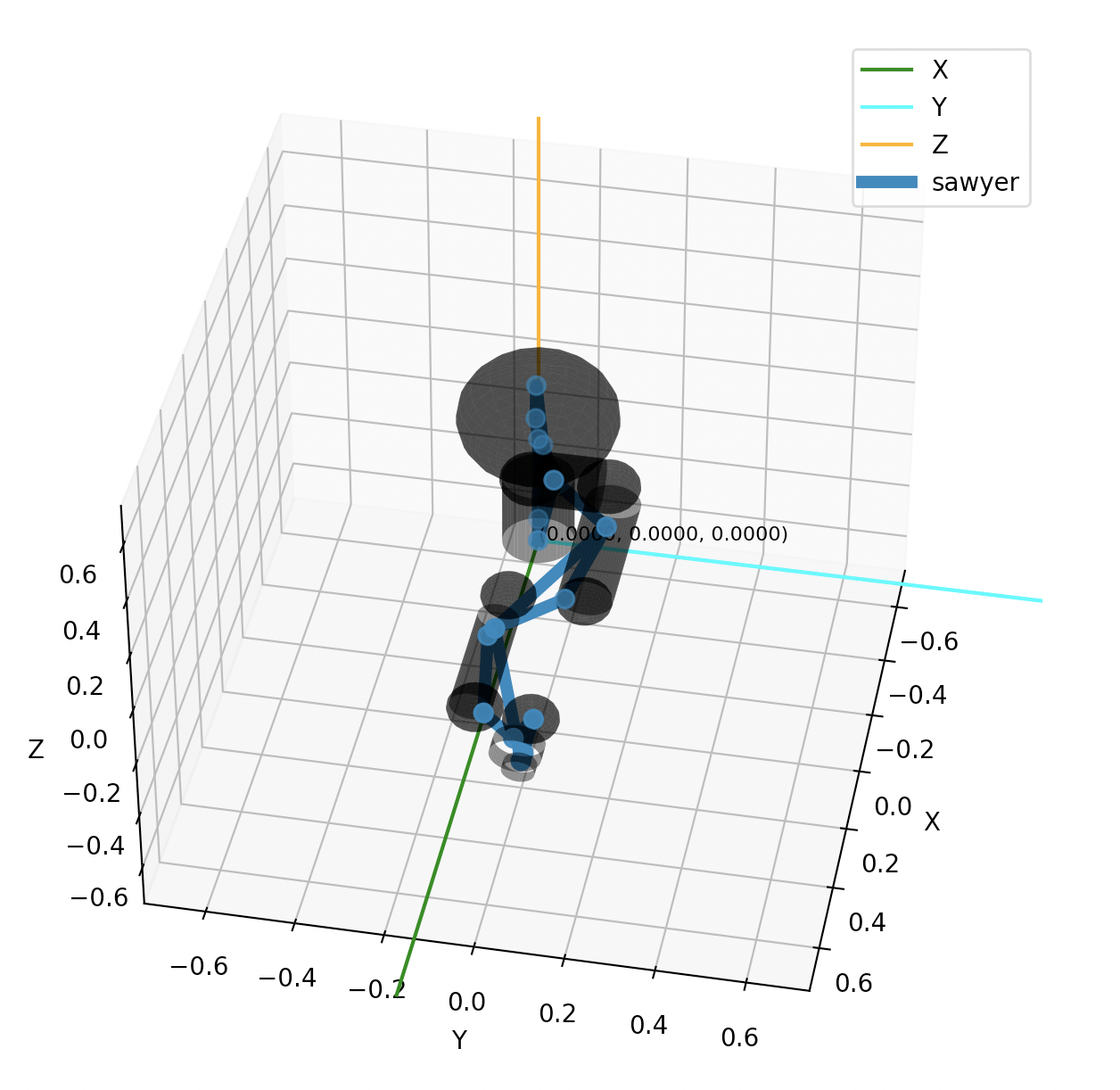
urdf
You can see visualization using matplotlib.
| baxter | sawyer | iiwa14 | panda |
|---|---|---|---|
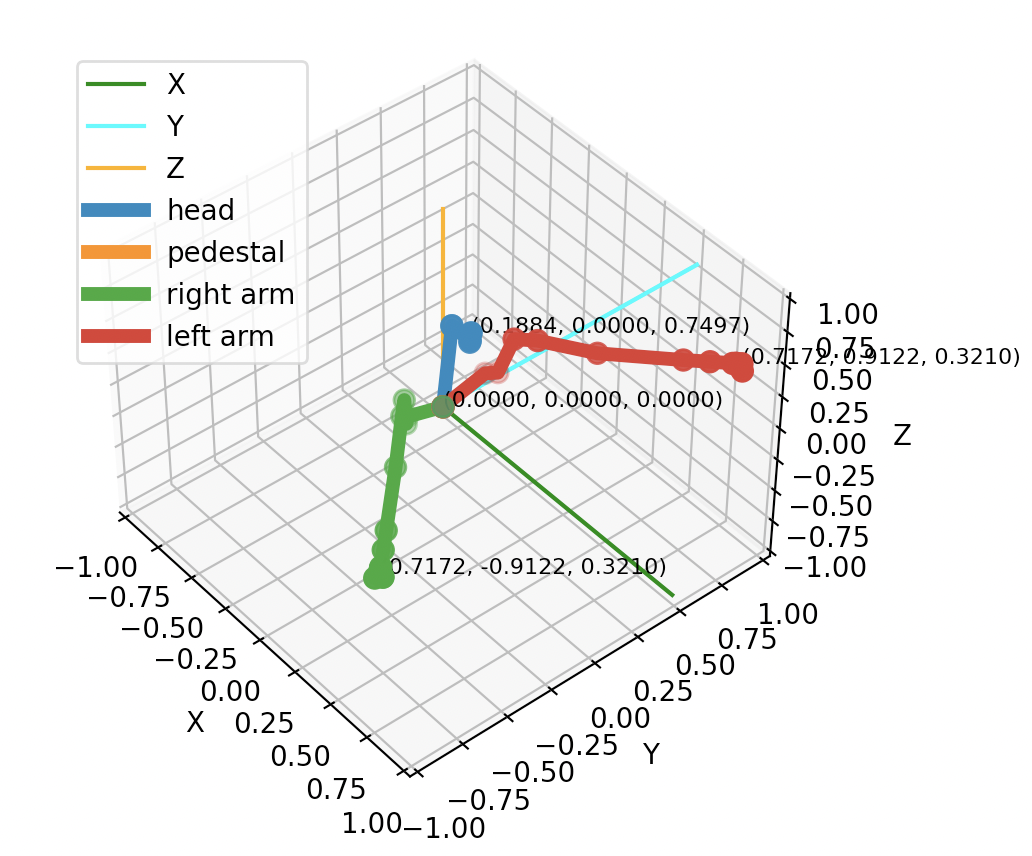 |
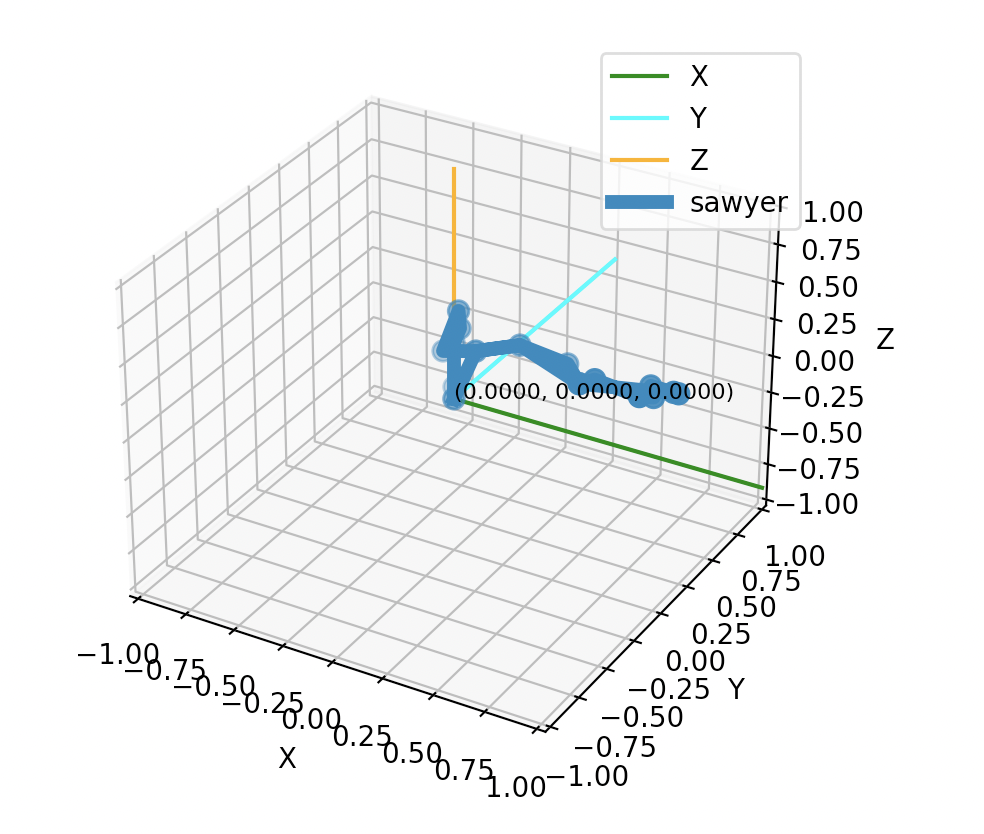 |
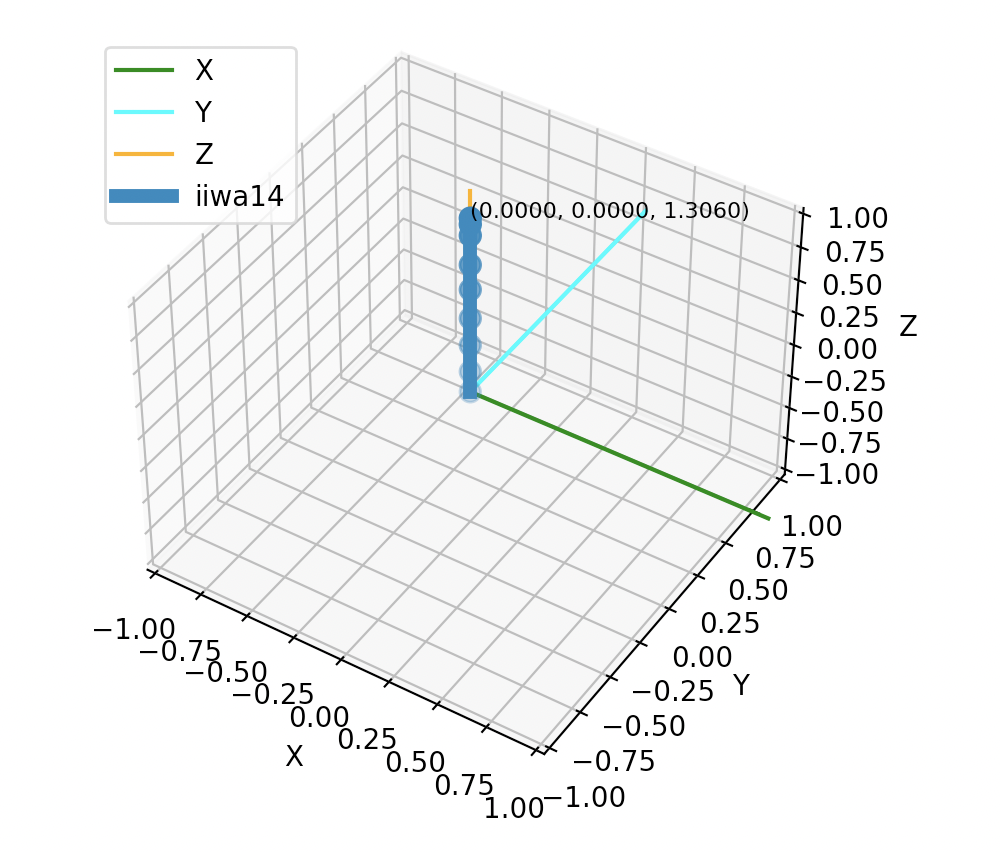 |
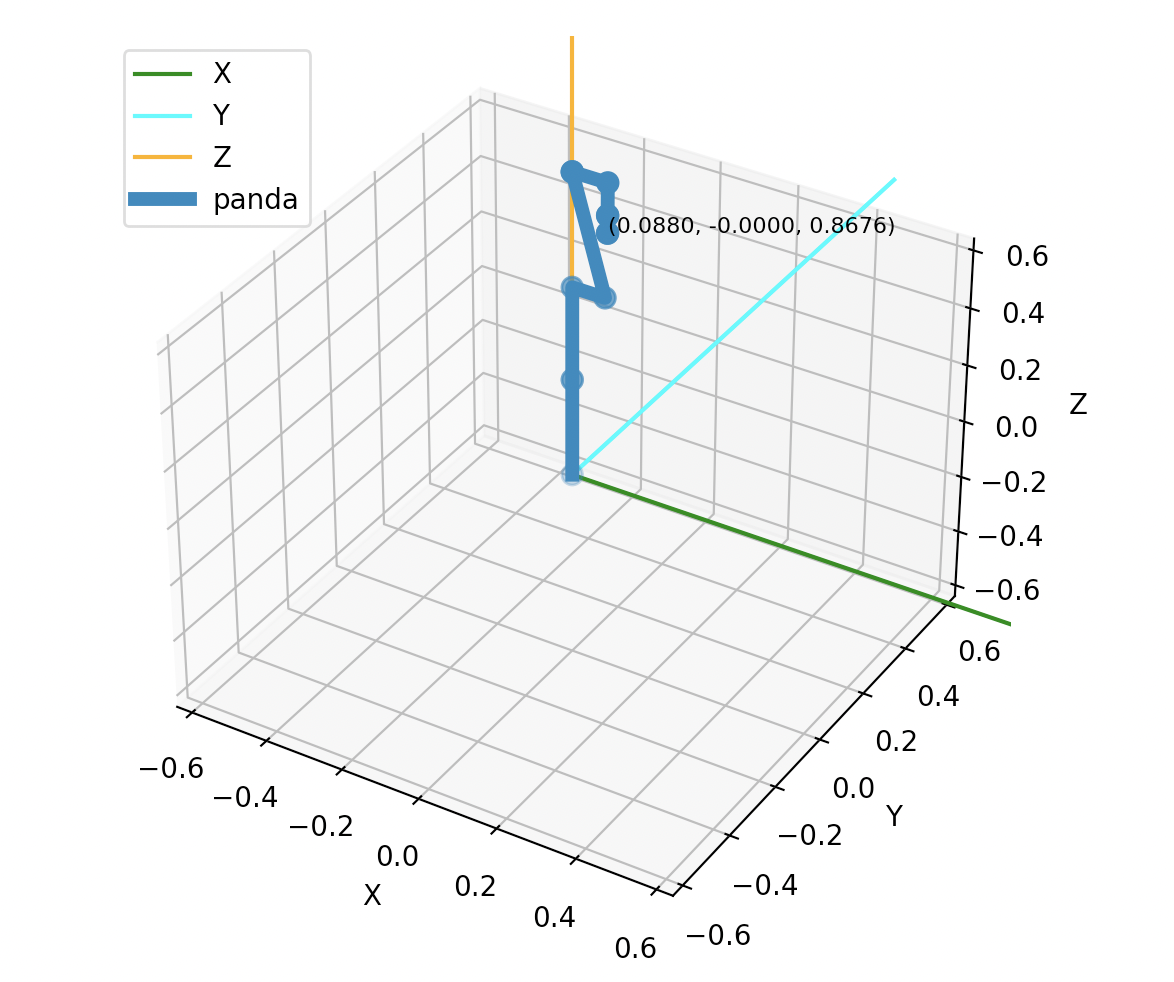 |
-
collision
You can see collision defined in collision/geometry tags in urdf.
| baxter | sawyer |
|---|---|
 |
 |
-
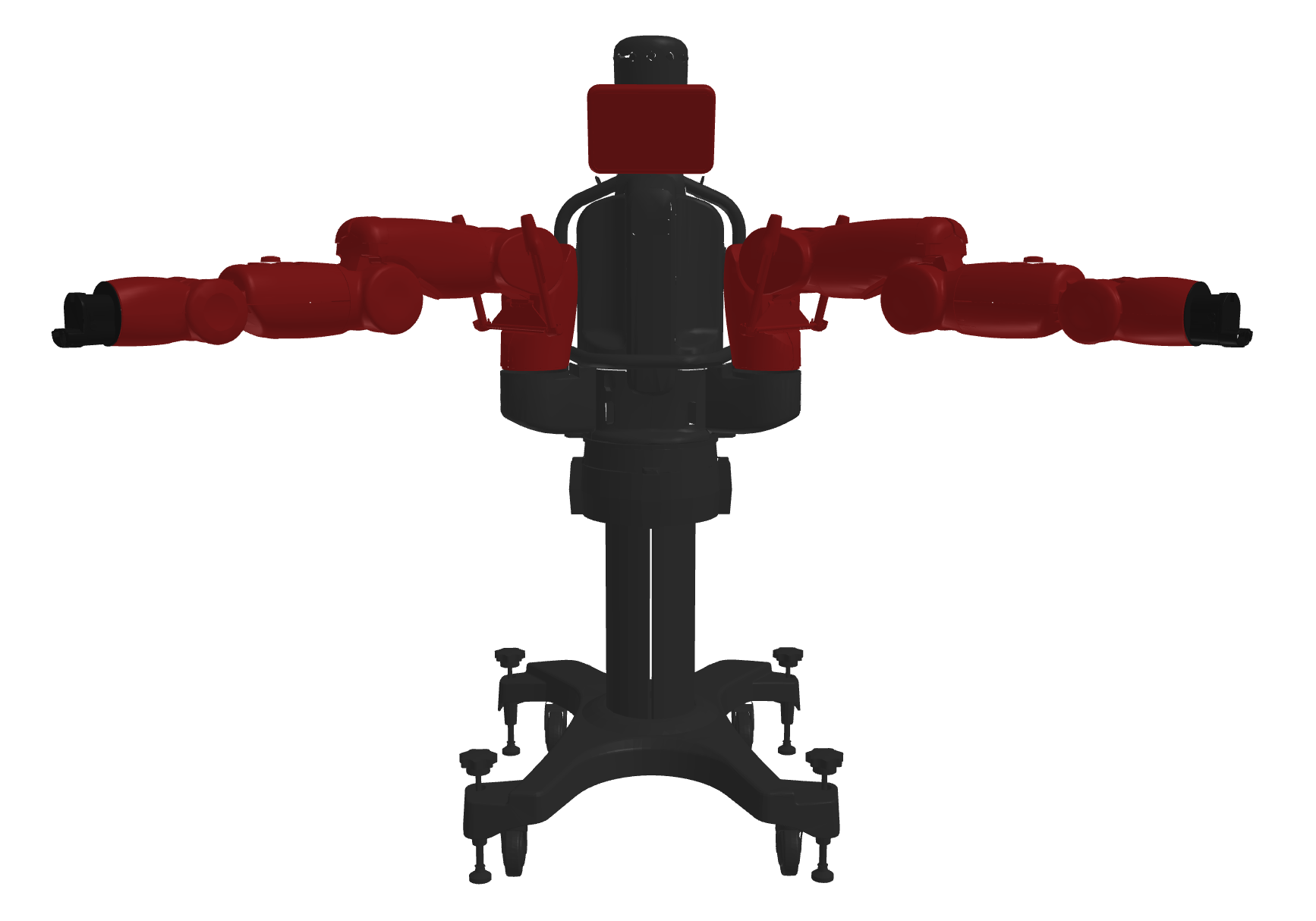
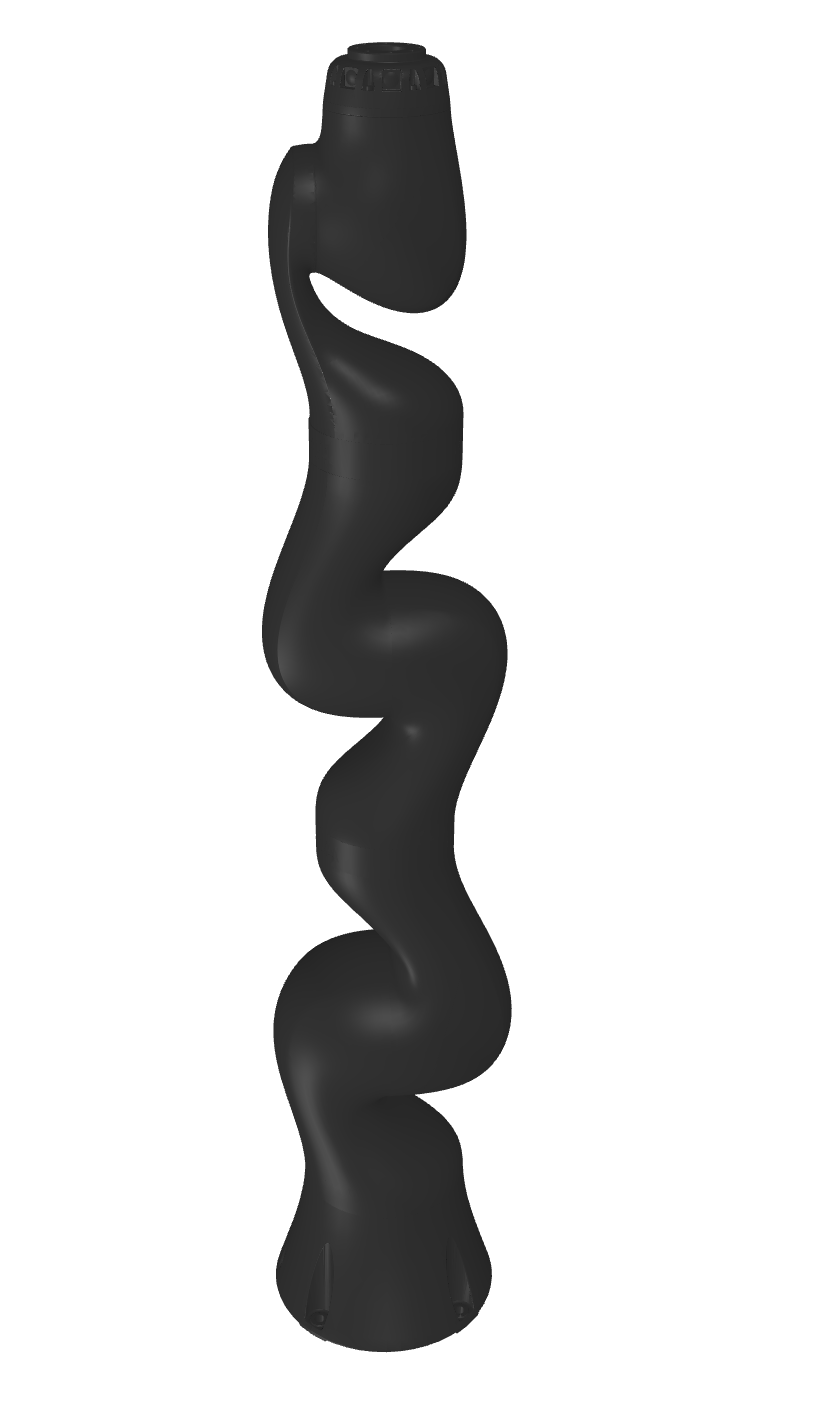
mesh
You can see mesh defined in visual/geometry tags in urdf.
| baxter | sawyer | iiwa14 | panda |
|---|---|---|---|
 |
 |
 |
 |
-
Animation
You can see an animation that visualizes trajectory
Please refer to here