Introduction to Humanoid Robotics 를 공부하면서 정리하려고 합니다.
일주일에 한 번 업데이트 예정입니다.
Chapter 2. Kinematics
2.1. Coordinate Transformations
2.1.1 World Coordinates
-
로봇을 개발할 때 가장 첫 번째로 생각해야 할 일은 무엇일까?
- 로봇의 각 part(link or joint)의 위치를 명확하게 정의하는 것
- 월드 좌표계를 사용해서 표현하자.
-
World Coordinates를 사용함으로써 로봇과 주변 객체, 물체를 성공적으로 잡는 것, 충돌 등을 define 할 수 있다.
-
World Corrdinates에서 사용되는 Position은 Absolute Positions 라고 불린다.
-
아래의 식을 이용하여 우리는 월드 좌표계 안에서 Absolute Attitude와 Absolute Velocity를 정의할 수 있다.
-
2.1.2. Local Coordinates and Homogeneous Transformations
![]()
![]() .
. ![]()
\(P_h : the\ hand\ tip\ position\)
\(P_a : the\ absolute\ position\ of\ the\ left\ shoulder\)
\(r : the\ position\ of\ the\ hand\ end\ relative\ to\ the\ shoulder\)
-
로봇 왼팔이 x축을 중심으로 파이만큼 회전을 할 때 월드 좌표계에서 어떻게 표현을 할 것인지 설명하려고 한다.
-
Rotation Matrix의 정의와, local coordinate 상의 position, attitude를 표현하는 방법에 대해서 알아야 한다.
-
a frame의 x축, y축, z축으로 향하는 방향 벡터를 모아 Rotation Matrix로 표현할 수 있다.

-
Rotation Matrix R_a는 벡터 r과 r’ 사이의 관계를 나타낸다. 기존 r 벡터를 a프레임의 x축에 대하여 파이만큼 회전된 r’ 벡터를 나타내는 것이다.
-
local coordinate에서 a에서 바라본 h의 위치는 아래처럼 나타낸다.
-
-
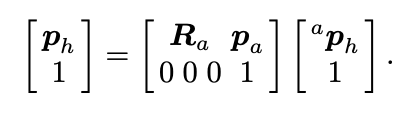
위의 내용을 토대로 월드 좌표계에서 hand의 위치는 아래처럼 표현된다.
-
위의 식을 행렬로 표현하면 아래와 같다.
-
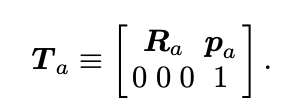
0과 1을 넣어주는 이유는 position vector P_a와 rotation matrix R_a를 함께 사용하기 위함이며 4x4 크기의 Matrix가 된다. 이 Matrix를 Homogeneous transformation matrices라고 한다.
-
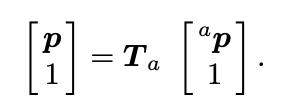
따라서, local 좌표계에서 표현된 위치를 world 좌표계에서 표현하기 위해 Homogeneous transformation matrix를 사용한다.
-
따라서, Homogeneous Transformation을 통해 World Coordinates에서 물체의 position과 attitude를 표현할 수 있다.
-
2.1.3 Local Coordinate Systems Local to Local Coordinate Systems
![]()
-
하나의 Local Coordinate System을 다른 Local Coordinate System으로 표현할 수도 있다. 위의 그림은 어깨에 해당하는 좌표계(Frame a)를 가지고 팔꿈치에 해당하는 좌표계(Frame b)로 어떻게 표현할 것인지 보여주는 그림이다.
-
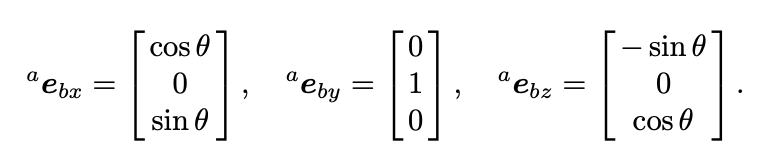
Shoulder 위치 a에서 straight로 내리면 elbow의 위치인 b가 되며 a의 좌표계에서 표현된 방향벡터를 구할 수 있다. 이 때, straight로 내리는 것은 a 프레임의 y축을 평행이동 시킨 것이다.
-
따라서, a에서 바라본 b의 방향 벡터는 아래와 같이 나타낸다.
-
위 방향벡터를 가지고 a에서 바라본 b의 Rotation Matrix를 나타낼 수 있다.
-
팔꿈치를 회전할 때 각도 theta가 생성되며 아래의 행렬로 표현한다.
-
-
b 좌표계에서 표현한 hand position과 a 좌표계에서 표현한 hand position의 관계는 아래와 같다.
-
마찬가지로 Homogeneous transformation를 이용하여 표현할 수 있다.
-
aP_b는 frame a에서 바라본 b의 position이며 y축에 대해 평행이동 시킨 거리이다.
-
-
지금까지 말한 것을 종합하면 월드 좌표계에서 hand의 position은 아래와 같이 표현할 수 있다.
-
homogeneous transformation의 곱을 통해 다른 좌표계에서 표현된 position을 world 좌표계로 표현할 수 있게 되었으며 T_b는 world 좌표계에서 표현된 homogenous transformation이다.
-
위와 같이 Homogeneous Transformation들의 Chain Rules을 통해 다른 좌표계를 하나의 좌표계로 표현할 수 있다는 것이다.
2.1.4 Homogeneous Transformations and Chain Rules
-
i 번째 frame에서 바라본 i+1 번째의 frame 관계를 나타낸 Homogeneous Transformation을 일반화 시켜보면 아래와 같이 표현되고
-
월드 좌표계에서 나타낸 Homogeneous Transformation은 첫 번째부터 마지막 frame까지 연속된 T의 곱으로 표현할 수 있다.

위의 형태를 chain rule이라고 하며, 체인룰을 통해 Robot의 Kinematics를 너무 복잡하지 않게 풀 수가 있다.
다음 시간에는 회전 운동의 특성에 대해 정리하고자 한다.