MuJoCo Package
macOS와 Ubuntu 18.04 환경에서 MuJoCo 설치 및 튜토리얼 실행 매뉴얼
MujoCo 공식 홈페이지와 mujoco-py github를 참조하여 진행하였습니다.
MuJoCo 버전 1.5 이상을 사용하려면 Mac 또는 Ubuntu 환경에서 MuJoCo를 시작하기 전에 꼭 확인해야 하는 부분이 있습니다❗
AVX(Advanced Vector Extensions) 이란? 👉 wiki 참조
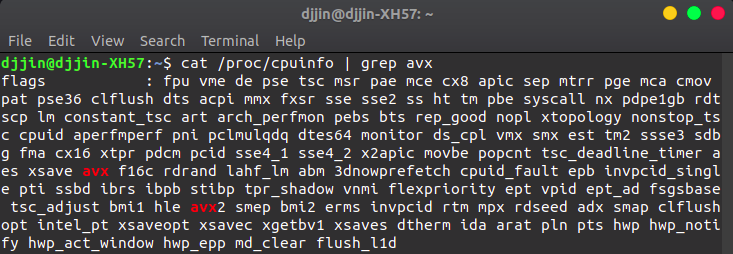
내 CPU에 AVX 기능이 있는지 확인하기
-
Mac
$ sysctl -a | grep avx -
Ubuntu
$ cat /proc/cpuinfo | grep avxAVX 정보가 안 나올 경우?

아무것도 나오지 않는다면 cpu를 교체하거나 MuJoCo 버전을 낮춰야 합니다 😂

필자의 경우 avx 기능이 있는 cpu로 교체 후 해결하였습니다.
-
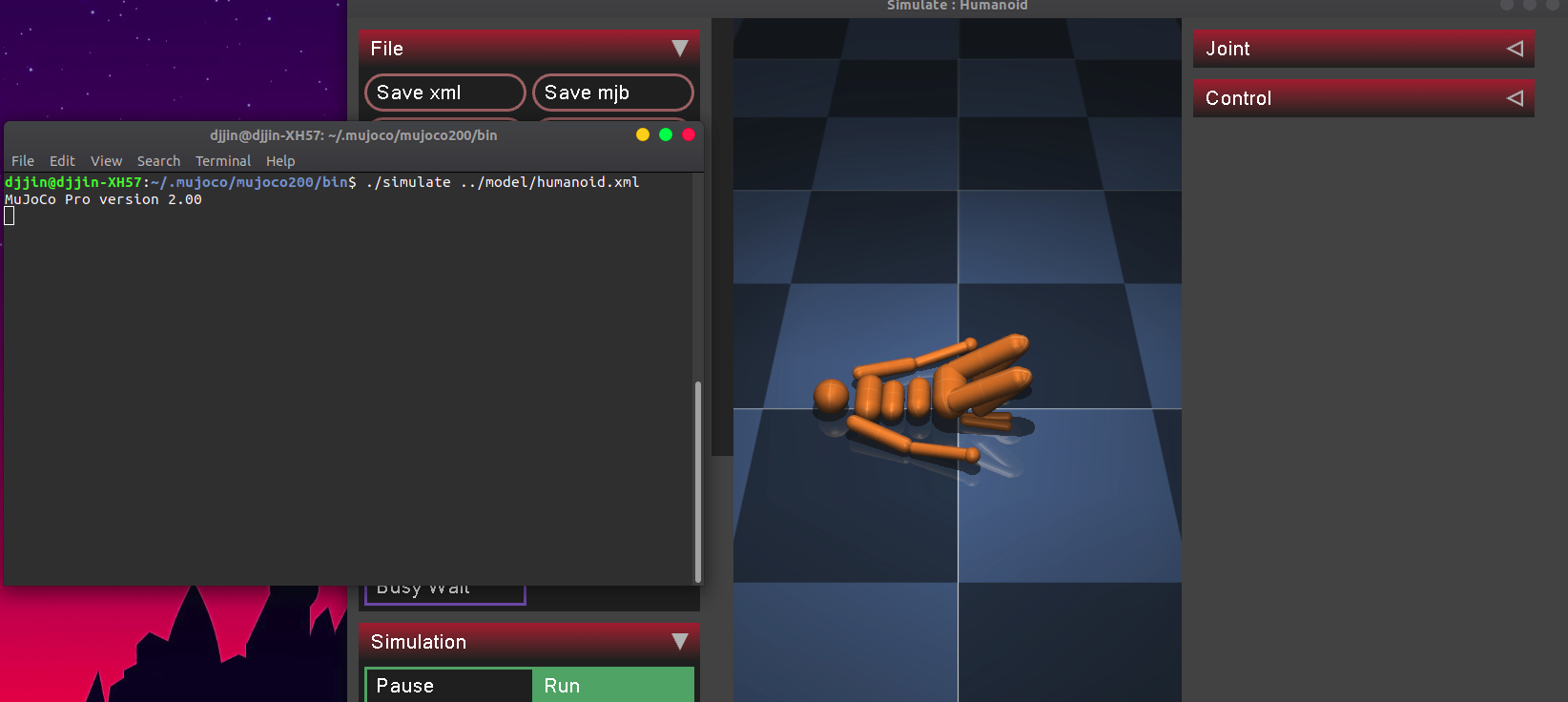
Result
아래의 화면이 나오면 설치 성공입니다.
1. Install MuJoCo
-
라이센스 키 발급
👉 MuJoCo website에 접속하여 30일 또는 1년 라이센스 키를 받습니다.
-
MuJoCo ver2.0 바이너리 파일 다운로드
👉 Download website에 접속하여 mujoco 파일 다운로드 및 압축 해제 후 디렉토리 명을 mujoco200으로 변경해줍니다.
-
~/.mujoco 디렉토리에 복사
👉 mjkey.txt(라이센스 키)와 mujoco200 디렉토리를 ~/.mujoco 디렉토리 안으로 복사합니다.
$ mkdir ~/.mujoco $ cp -r mjkey.txt mujoco200 ~/.mujoco/ $ cp -r mjkey.txt ~/.mujoco/mujoco200/bin/ -
mujoco 시뮬레이터 실행하기
$ cd ~/.mujoco/mujoco200/bin $ ./simulate ../model/humanoid.xml
2. Install and use mujoco-py
저의 경우 local 환경에 설치하는 걸 꺼려해서 anaconda 설치 후 진행하였습니다.
2-1. 의존 패키지 설치하기
✍ in Mac (python 3.9)
-
llvm, boost, hdf5 패키지 설치
$ brew install llvm $ brew install boost $ brew install hdf5 -
.bashrc 또는 .zshrc 에 llvm 설치 경로 추가
$ vi ~/.bashrc # 맨 아래로 가서 i를 눌러 끼워넣기 모드로 변경 # 아래의 내용 복사 하기 ------------------------------------------ export PATH="/usr/local/opt/llvm/bin:$PATH" export CC="/usr/local/opt/llvm/bin/clang" export CXX="/usr/local/opt/llvm/bin/clang++" export CXX11="/usr/local/opt/llvm/bin/clang++" export CXX14="/usr/local/opt/llvm/bin/clang++" export CXX17="/usr/local/opt/llvm/bin/clang++" export CXX1X="/usr/local/opt/llvm/bin/clang++" export LDFLAGS="-L/usr/local/opt/llvm/lib" export CPPFLAGS="-I/usr/local/opt/llvm/include" ------------------------------------------ # 복사 후 esc 또는 ctrl+[ 누른 후 :wq 입력 후 엔터
✍ in Ubuntu 18.04 (python 3.7)
-
libosmesa6-dev libgl1-mesa-glx libglfw3 설치
$ sudo apt install -y libosmesa6-dev libgl1-mesa-glx libglfw3 -
bashrc에 LD_LIBRARY_PATH, LD_PRELOAD 추가
$ vi ~/.bashrc export LD_LIBRARY_PATH=${LD_LIBRARY_PATH}:$HOME/.mujoco/mujoco200/bin export LD_PRELOAD=/usr/lib/x86_64-linux-gnu/libGLEW.so
2-2. mujoco-py 설치
👉 설치하는 방법은 두 가지가 있으며 저는 2번째 방법으로 설치하였습니다.
-
pip로 설치하기
$ pip install -U 'mujoco-py<2.1,>=2.0' -
python setup.py 로 설치하기
$ git clone https://github.com/openai/mujoco-py.git $ cd mujoco-py $ python setup.py install
2-3. 예제 실행하기
-
test.py 만든 후 실행
import mujoco_py import os mj_path, _ = mujoco_py.utils.discover_mujoco() xml_path = os.path.join(mj_path, 'model', 'humanoid.xml') model = mujoco_py.load_model_from_path(xml_path) sim = mujoco_py.MjSim(model) print(sim.data.qpos) sim.step() print(sim.data.qpos)👌 제대로 설치가 되었다면 에러가 나지 않고 데이터가 나와야합니다.
-
examples 디렉토리에 있는 예제 실행
-
실행 후 이 에러가 난다면? 👉 참고
ERROR: GLEW initalization error: Missing GL version
해당 라이브러리를 preload 시켜줍니다.
export LD_PRELOAD=/usr/lib/x86_64-linux-gnu/libGLEW.so
-
실행 후 이 에러가 난다면?
Exception: Failed to load XML file: xmls/fetch/main.xml. mj_loadXML error: b’XML parse error at line 0, column 0:\nFailed to open file\n’
xml 파일을 불러올 때 경로를 찾지 못한 문제로 파일을 수정해줍니다.
from
load_model_from_path(“xmls/tosser.xml”)
to
load_model_from_path(“../xmls/tosser.xml”)
-
Docker로 실행할 경우
라이센스 키가 개인 상업용 라이선스 이어야 합니다.
- 도커 설치하기
-
mjkey.txt(라이센스 키) mujoco-py 디렉토리 안으로 복사 후 Dockerfile 실행 (약 10분 소요)
$ cd ~/.mujoco && cp -r mjkey.txt mujoco-py/ $ docker build mujoco-py -
도커 이미지 확인
$ docker images -
도커 이미지로 컨테이너 생성
$ docker create -i -t --name mujoco docker_id /bin/bash -
컨테이너 실행
$ docker start mujoco $ docker attach mujoco -
컨테이너 삭제 및 이미지 삭제
# 컨테이너 삭제 $ docker rm -f mujoco # 이미지 삭제 $ docker rmi 이미지id